Chuyển đổi giá trị nhập sang đơn vị góc mặc định của máy tính
Sau khi nhập một giá trị, nhấn 
 (Angle Unit)* để hiển thị menu đặc tả đơn vị góc bên dưới. Bấm phím số tương ứng với đơn vị góc của giá trị nhập. Máy tính sẽ tự động chuyển đổi sang đơn vị góc mặc định của máy tính.
(Angle Unit)* để hiển thị menu đặc tả đơn vị góc bên dưới. Bấm phím số tương ứng với đơn vị góc của giá trị nhập. Máy tính sẽ tự động chuyển đổi sang đơn vị góc mặc định của máy tính.
* Tùy vào phương thức tính toán, bạn phải nhấn  .
.
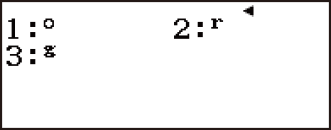
°: Độ, r : Radian, g : Grad
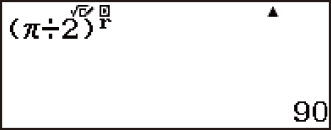
Ví dụ 1: Để chuyển đổi các giá trị sau đây sang độ: π2 radian = 90°, 50 grad = 45°
Quy trình sau giả định rằng đơn vị góc mặc định của máy tính là độ.


 (π)
(π) 2
2
(Angle Unit)(r)
- 50(Angle Unit)
 (g)
(g) 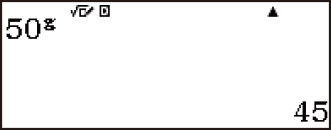
Ví dụ 2: cos(π radian) = -1, cos(100 grad) = 0
 (π)
(π)
(Angle Unit)(r)
- 100(Angle Unit)(g)
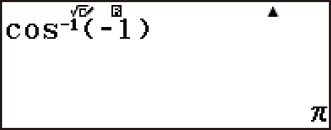
Ví dụ 3: cos-1(-1) = 180 (Angle Unit: Degree), cos-1(-1) = π (Angle Unit: Radian)
(Angle Unit: Degree)
- (cos-1)
 1
1 
(Angle Unit: Radian)
- (cos-1)1